
Zed Stereo Camera Depth Accuracy
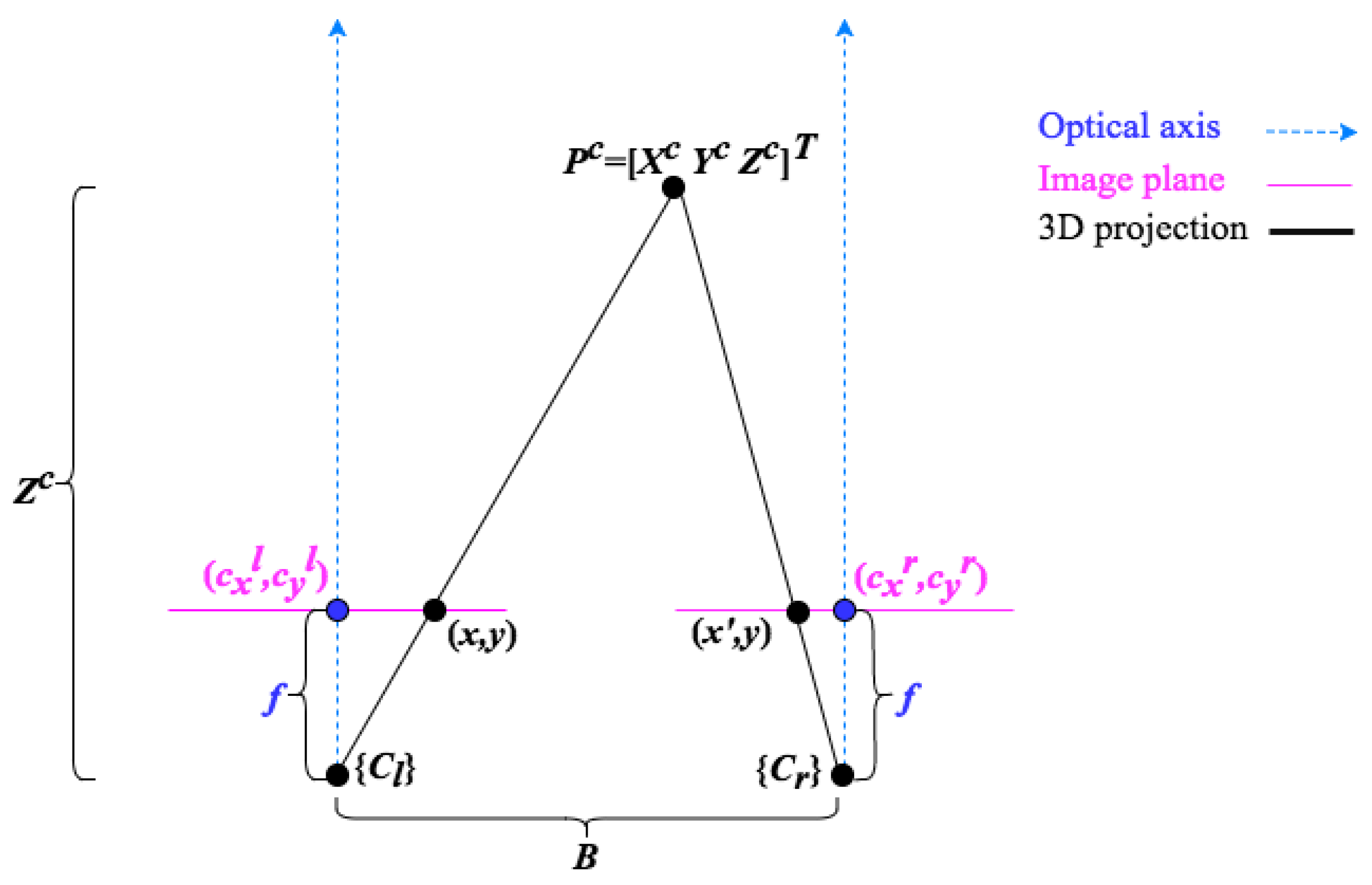
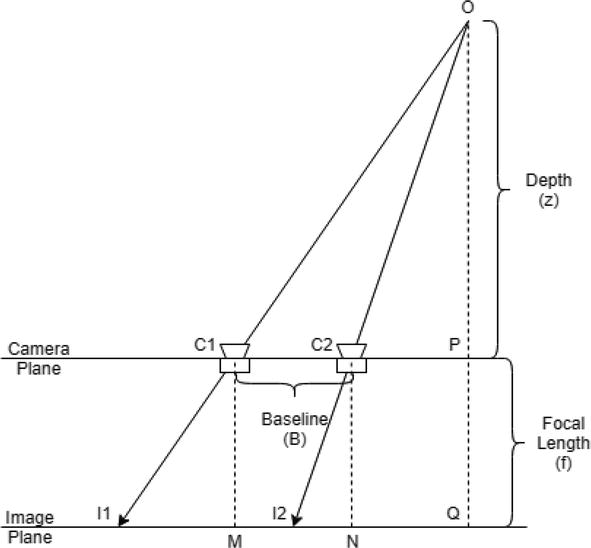
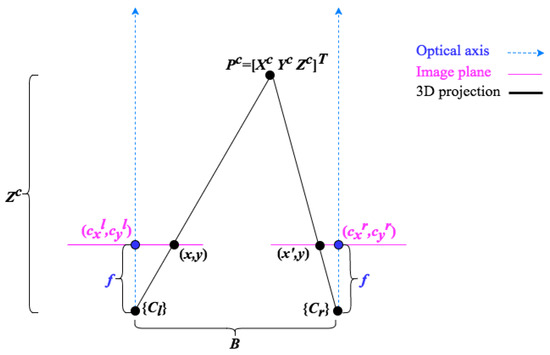
For this purpose , the formula to calculate the depth accuracy is d z = ( z 2 ∗ d e) / ( f ∗ b) but how do we calculate z , d e and f.
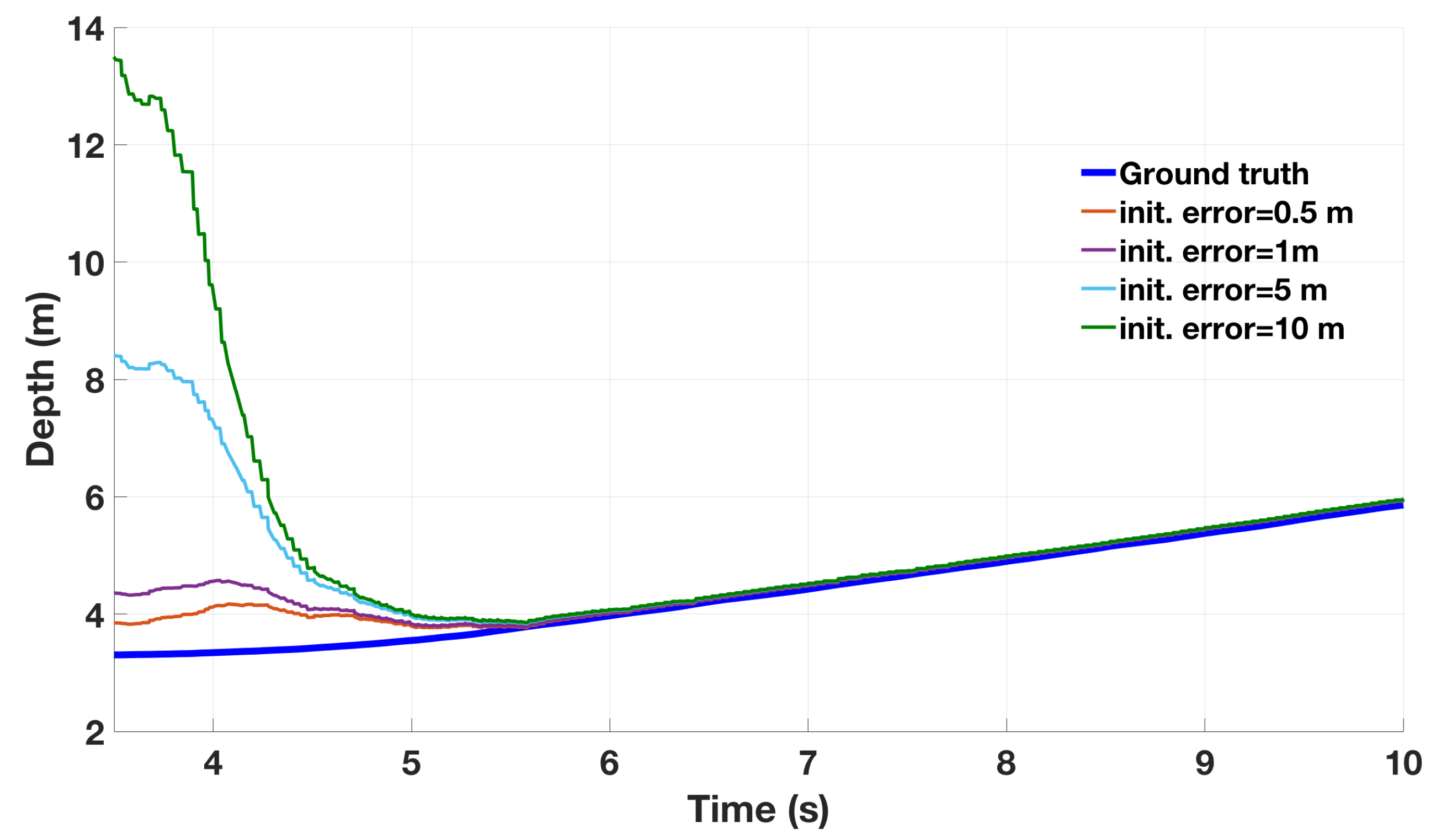
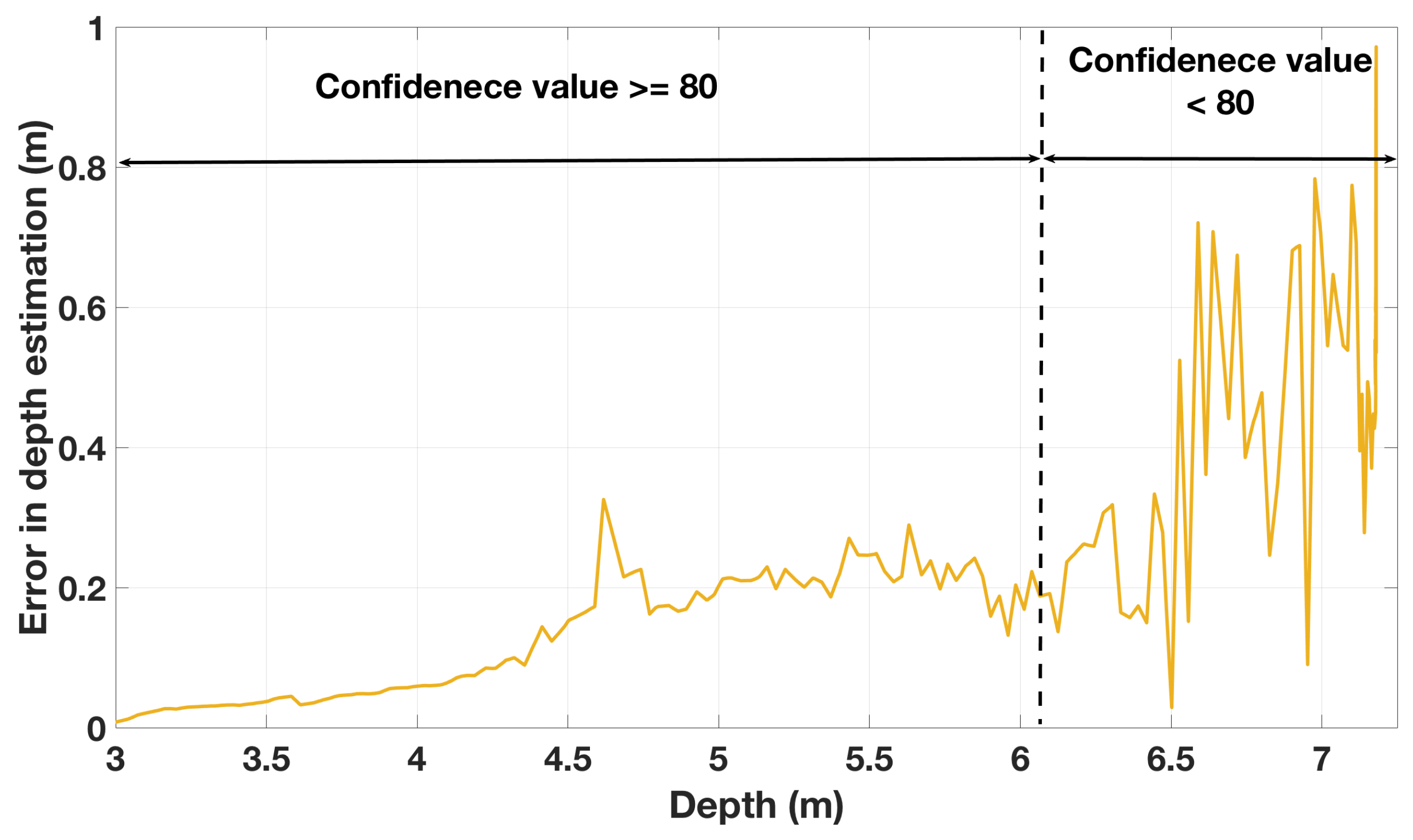
Zed stereo camera depth accuracy. However, you may want to recalibrate your camera in the following situations:. Depth accuracy decreases quadratically over the z-distance, with a stereo depth accuracy of 1% of the distance in the near range to 9% in the far range. E_z = 23.5mm@ z = 2m.
All ZED 2, ZED and ZED Mini stereo cameras are calibrated at our factory using special equipment that guarantee highly accurate stereo and sensor calibration. It has been designed for the most challenging applications, including autonomous vehicle control, mobile mapping, aerial mapping, security, and surveillance. The configuration that offers the best depth accuracy is to place the camera at a working distance of 1 meter of the scene for the ZED (and 0.5m for the ZED Mini).
An all-new lightweight neural network for stereo matching brings stereo depth sensing to the next level, with a wide 110° x 70° FOV. If you have a ZED camera rev.1 (produced before ). ZED Camera and SDK Overview.
ZED DEPTH TheSENSORZED is a stereo camera that provides high definition images and accurate measure of the environment depth. -10°C to +45°C (14°F to 113°F). Is is taken from matlab stereo-callibration app which gives 'Stereoparameter' ?.
Keep in mind that e_z is one approximate standard deviation of a Gaussian and that it is only adequate for near points. So @1mwith good stereo matching and perfect calibration, most measurements will be below 1 cm. D z is the depth error in meters, z is the depth in meters, d e is the disparity error in pixels, f is the focal length of the camera in pixels and b is the camera baseline in meters.
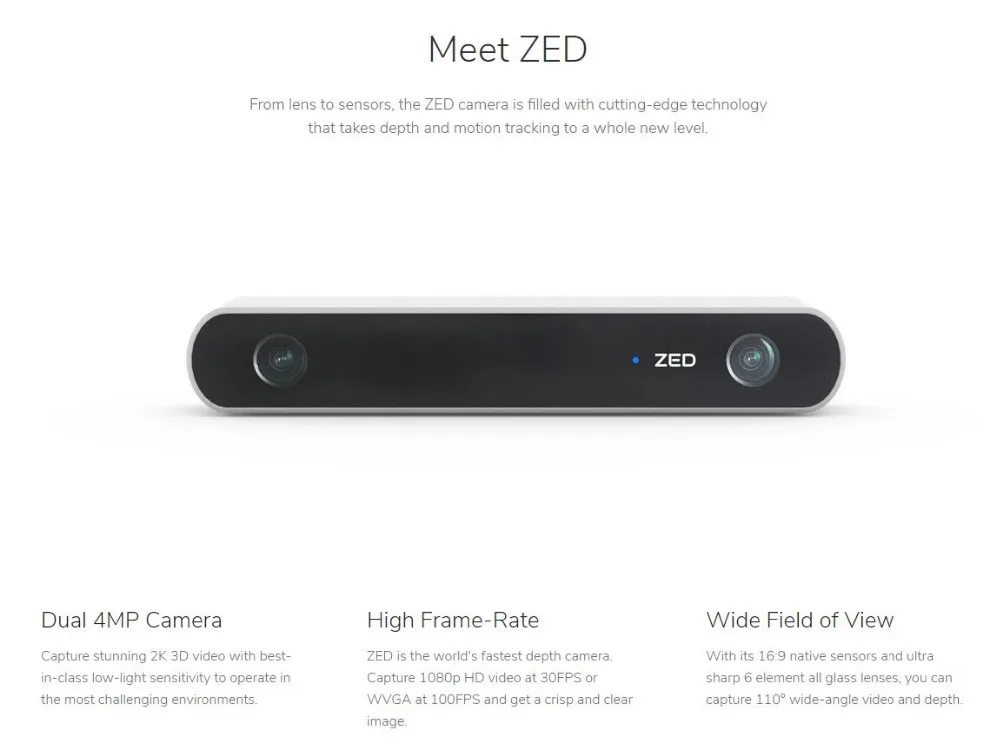
Long-Range 3D Sensing Perceive and understand your surroundings in 3D up to m distance, with increased accuracy in the close range. Using an 8-element lens with optically corrected distortion and a wider ƒ/1.8 aperture, the ZED 2's field of view extends to 1° and captures 40% more light. ZED cameras perceive the world in three dimensions.
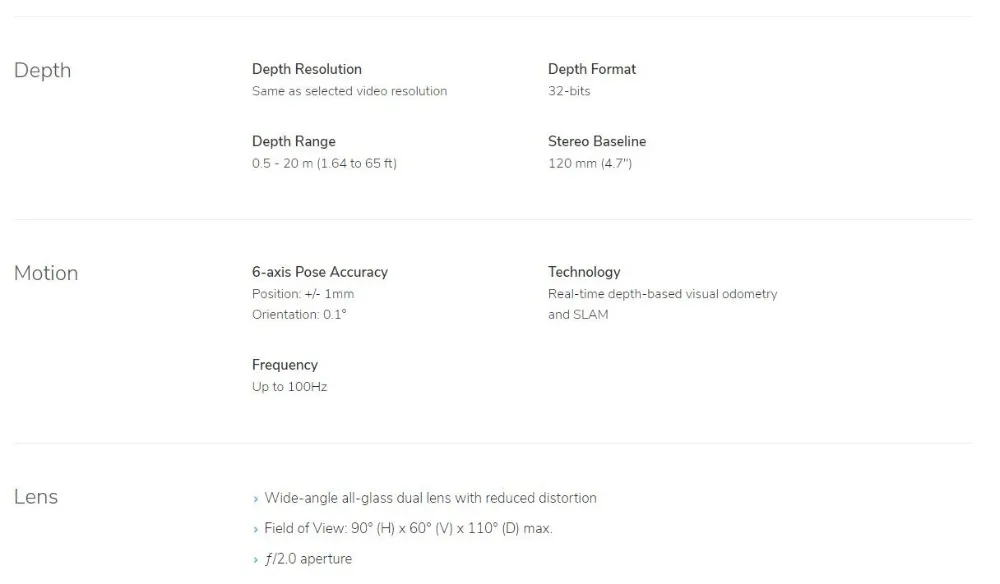
These surfaces usually generate temporal instability in depth measurements. E_z = 6mm@ z = 1m. 110°(H) x 70°(V) x 1°(D) 2x (672x376) @100fps Depth Range 0.3 m to m (1 to 65.6 ft) Depth Accuracy < 1% up to 3m < 5% up to 15m Environmental Barometer Temperature Physical Operating Temp.
The ZED can be used both indoors and outdoors at long range (up to m). Using binocular vision, the cameras can tell how far objects are around you from 0.1 to m, indoors and outdoors. The ZED Mini can also be used indoors and outdoors up to 15m.
Camera Output ResolutionSide by Side 2x (28x1242) @15fps 2x (19x1080) @30fps 2x (1280x7) @60fps Field of View Max. From lens to sensors, the ZED camera is filled with cutting-edge technology that takes depth and motion tracking to a whole new level. Depth accuracy can also be affected by outliers’ measurements on homogenous and textureless surfaces such as white walls, green screens and specular areas.
All Stereolabs cameras can be used both indoors and outdoors at long range (up to m).
Remote Sensing Free Full Text Relative Importance Of Binocular Disparity And Motion Parallax For Depth Estimation A Computer Vision Approach Html

The Operation Principle Of The Zed Camera Download Scientific Diagram
Www Preprints Org Manuscript 1705 0170 V1 Download
Zed Stereo Camera Depth Accuracy のギャラリー

Real Time Object Detection And Distance Measure Zed Youtube

Sparse Depth Sensing For Resource Constrained Robots Deepai

Introducing Zed Mini Stereolabs
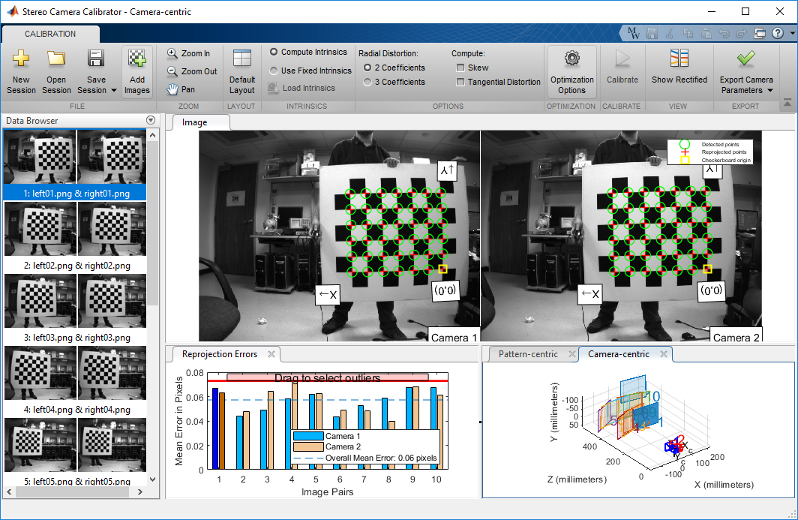
Stereo Camera Calibrator App Matlab Simulink
3

Pdf Depth Data Error Modeling Of The Zed 3d Vision Sensor From Stereolabs Semantic Scholar
1 Pcs X Zed Stereo Camera 3d Camera For Depth Sensing And Motion Tracking Integrated Circuits Aliexpress
1

Stereolabs Brings Position Tracking To Mobile Vr Using Its Zed Camera Pair Extremetech
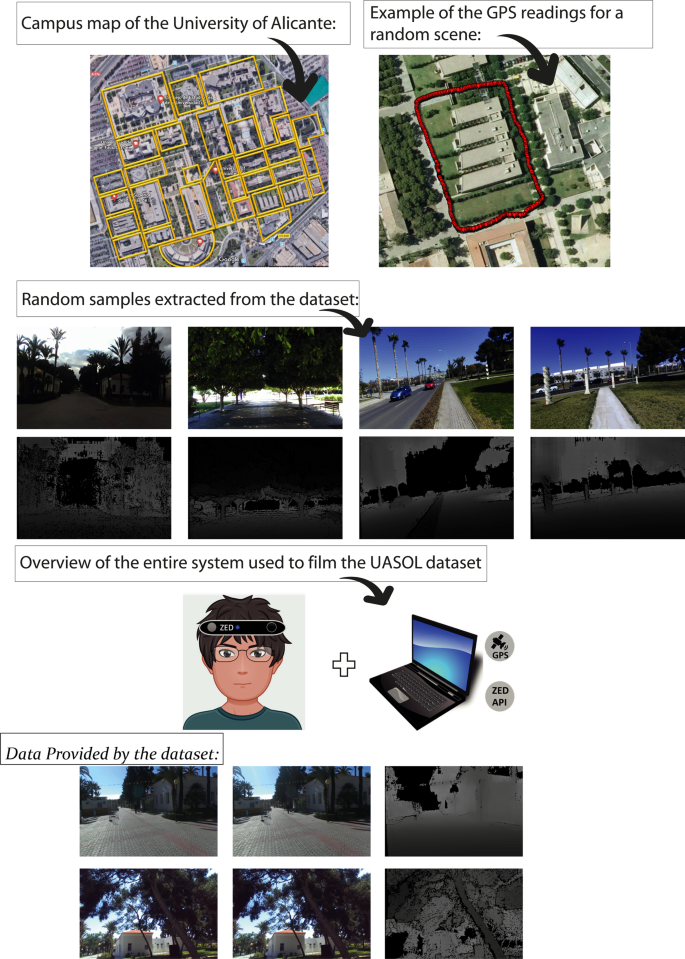
Uasol A Large Scale High Resolution Outdoor Stereo Dataset Scientific Data

Stimulant Depth Sensor Shootout Stimulant
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En
Remote Sensing Free Full Text Relative Importance Of Binocular Disparity And Motion Parallax For Depth Estimation A Computer Vision Approach Html
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En

Edge
Www Preprints Org Manuscript 1705 0170 V1 Download

Requirements From Stereoscopic Vision And Stereo Camera Depth Download Table

3d Camera Survey Ros Industrial

Zed Stereo Camera Chironix

Depth Cameras Silent Revolution When Robots Will See Part 2 Sudo Null It News

Zed Stereo Camera Chironix
1

Road Detection With Point Cloud Library And Zed Stereoscopic Vision System Neil Nie

Stimulant Depth Sensor Shootout Stimulant
Github Stereolabs Zed Ros2 Wrapper Ros 2 Wrapper Beta For The Zed Sdk

Pdf Depth Data Error Modeling Of The Zed 3d Vision Sensor From Stereolabs

Review Realsense D415 Vs Sr300 Vs Orbbec Astra S 3d Scan Expert

Pdf Method For Measuring Stereo Camera Depth Accuracy Based On Stereoscopic Vision
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En
Roscon Ros Org 17 Presentations Roscon 17 3d vision technology Pdf
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En

Stereolabs The Zed2 3d Camera Introduces Machine Learning Tuned Image Signal Processor For Best In Class Picture Quality And An All New Lightweight Neural Network For Stereo Matching Improving Stereo Depth Accuracy At Close

Zed Stereo Camera Records 3d And Depth At Every Pixel
Frontiers Event Based Stereo Depth Estimation Using Belief Propagation Neuroscience
Www Preprints Org Manuscript 1705 0170 V1 Download
Www Mybotshop De Datasheet Zed Camera Datasheet Pdf
Frontiers Event Based Stereo Depth Estimation Using Belief Propagation Neuroscience
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En

Zed 2 Ai Stereo Camera Stereolabs

Event Based Stereo Depth Estimation Using Belief Propagation Abstract Europe Pmc

Pdf Depth Data Error Modeling Of The Zed 3d Vision Sensor From Stereolabs

Efficient Depth Estimation Using Sparse Stereo Vision With Other Perception Techniques Intechopen

Arxiv Sanity Preserver

Efficient Depth Estimation Using Sparse Stereo Vision With Other Perception Techniques Intechopen

Stimulant Depth Sensor Shootout Stimulant
Q Tbn 3aand9gcsx9dt6mgrehyrv22ocwa4szzbnhi0ek0hnaycvckmlxvrolje0 Usqp Cau

Zed Stereo Camera Stereolabs

Visual Odometry With The Zed Stereo Camera Kapernikov

Zed Camera Depth Image Ros Answers Open Source Q A Forum

Introducing Zed Mini Stereolabs
Www Ijrte Org Wp Content Uploads Papers V8i1s3 As319 Pdf

Efficient Depth Estimation Using Sparse Stereo Vision With Other Perception Techniques Intechopen
Www Mdpi Com 1424 18 9 3122 Pdf

Zed Stereo Camera Chironix

Questionable Zed Accuracy Issue 44 Stereolabs Zed Examples Github
The Rise Of Depth On Mobile Graphics And Gaming Blog Graphics And Gaming Arm Community

Point Cloud In Between Svo And Bag Issue 265 Stereolabs Zed Ros Wrapper Github

Zed 2 Ai Stereo Camera Stereolabs

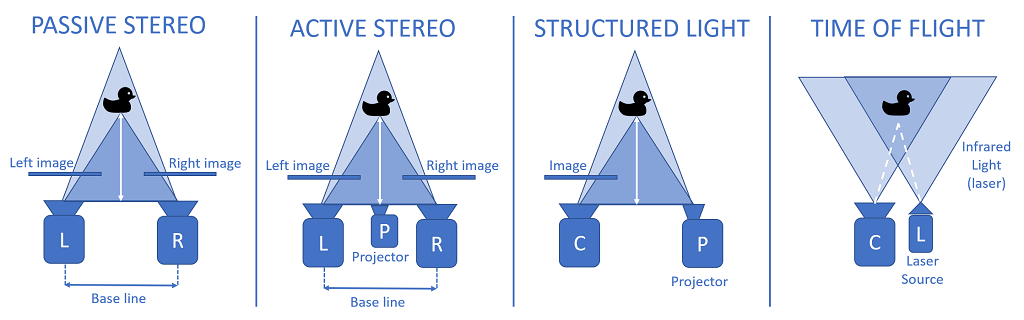
Comparing Three Prevalent 3d Imaging Technologies
Www Preprints Org Manuscript 1705 0170 V1 Download

Zed Camera Isaac 1nx Documentation
Www Preprints Org Manuscript 1705 0170 V1 Download
The Rise Of Depth On Mobile Graphics And Gaming Blog Graphics And Gaming Arm Community

Zed Stereo Camera Stereolabs
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En

Depth Settings Stereolabs
Remote Sensing Free Full Text Relative Importance Of Binocular Disparity And Motion Parallax For Depth Estimation A Computer Vision Approach Html
Osa Reducing The Minimum Range Of A Rgb Depth Sensor To Aid Navigation In Visually Impaired Individuals

Event Based Stereo Depth Estimation Using Belief Propagation Abstract Europe Pmc

Frontiers Event Based Stereo Depth Estimation Using Belief Propagation Neuroscience

Zed Stereo Camera Stereolabs

Vive Pro Ar Srworks Vs Zed Mini Augmented Reality
Remote Sensing Free Full Text Relative Importance Of Binocular Disparity And Motion Parallax For Depth Estimation A Computer Vision Approach Html

Zed Depth And Motion Tracking Camera Supports Nvidia Jetson Nano Board

Vive Pro Ar Srworks Vs Zed Mini Augmented Reality

Stereo Camera Wikipedia
Elcvia Cvc Uab Es Article Download V17 N1 Ortiz 1084 Pdf En

Comparison Of 3 Types Of 8d Cameras In Various Environments No umx Indoor Tegakari An Information Transmission Medium For Research And Development

A Multi Camera Dataset For Depth Estimation In An Indoor Scenario Sciencedirect

Road Detection With Point Cloud Library And Zed Stereoscopic Vision System Neil Nie

2k Stereo Camera Zed Caesarvr13

Stereolabs The Zed2 3d Camera Introduces Machine Learning Tuned Image Signal Processor For Best In Class Picture Quality And An All New Lightweight Neural Network For Stereo Matching Improving Stereo Depth Accuracy At Close

Depth Settings Stereolabs
How Does The Zed Work Help Center Stereolabs
Www Preprints Org Manuscript 1705 0170 V1 Download

Stereo Cameras Paul S Wiki

Stereo Vision Assumption For Disparity Error Size

Realtime Depth Test Using Zed Stereo Camera Youtube

Comparison Of 3 Types Of 8d Cameras In Various Environments No umx Indoor Tegakari An Information Transmission Medium For Research And Development
Efficient Depth Estimation Using Sparse Stereo Vision With Other Perception Techniques Intechopen

Zed Stereo Camera Simulates Human Visual Depth Perception
Www Preprints Org Manuscript 1705 0170 V1 Download
Roscon Ros Org 17 Presentations Roscon 17 3d vision technology Pdf
Roscon Ros Org 17 Presentations Roscon 17 3d vision technology Pdf
Remote Sensing Free Full Text Relative Importance Of Binocular Disparity And Motion Parallax For Depth Estimation A Computer Vision Approach Html

3d Camera Survey Ros Industrial
Zed Depth Camera From Stereolabs 3dscanning
1 Pcs X Zed Stereo Camera 3d Camera For Depth Sensing And Motion Tracking Integrated Circuits Aliexpress

Introducing Zed Mini Stereolabs

Zed Stereo Camera Chironix



